カテゴリーⅢ飛行、レベル4飛行(有人地帯における補助者なし目視外飛行)
この記事の目次

2022年12月5日、改正航空法の施行によって、機体の認証制度や操縦士の国家資格が設けられ、レベル4飛行(有人地帯における補助者なし目視外飛行)を含むカテゴリーⅢ飛行が解禁となりました。レベル4とは、住宅地などの有人地帯でドローンの操縦者が目視できない範囲でドローンを自動飛行させる高度な飛行のこと。
レベル4飛行を行うにあたって、第一種機体認証を受けた無人航空機及び一等無人航空機操縦士の技能証明に加えて、適切な運航管理体制がとられていることについて個別に国土交通大臣の許可・承認を受ける必要があります。
第三者上空の飛行という特にリスクの高い飛行を行うことから、飛行させるもの(操縦者)だけではなく、補助者、所有者、整備者、運航管理者、安全飛行管理者等を含め総合的な運航管理が必要であり、リスク評価を実施したうえでこの結果を踏まえた飛行マニュアルを作成することを求められています。
リスク評価にあたってはJARUS(http://jarus-rpas.org/publications/)のSORA(Safety Operatinal Risk Assessment)を踏まえ、我が国の制度に整合を図って作成された福島RTFのガイドライン(https://onl.la/FCDWy6W)使用を推奨されています。
レベル4実例

現在(2023年11月10日時点)、国内でレベル4飛行の許可・承認を取得した事例は2件となります。
国内で第一種型式認証を受けた機体は、株式会社ACSLの「PF2-CAT3」(https://www.acsl.co.jp/news-release/press-release/2798/)のみとなりますので、2件の事例はPF2-CAT3を使用しています。
1件目:日本郵便株式会社、2023年3月24日、東京都西多摩郡奥多摩町
発表資料(https://onl.la/cSqZKsU)
2件目:ANAホールディングス株式会社、2023年11月6日、沖縄県久米島町
発表資料(https://www.anahd.co.jp/group/pr/pdf/20231013.pdf)
許可・承認申請について
許可・承認申請先は、国土交通省無人航空機安全課となります。
レベル3飛行についても、今では地方航空局で審査をしていますが、制度当初は国土交通省まで赴き、細かい調整を行ったうえで許可・承認という流れを取っていました。
徐々に解釈や審査運用が明確になってきたことで、地方航空局のみの審査で審査が完結することになりました。
したがって、レベル4の実用化が本格化するだいぶ先の未来かと思いますが、レベル4飛行にかかる許可・承認申請についても、申請件数が増え、解釈や審査運用が明確になれば地方航空局で審査ということになる可能性があるかもしれません。
レベル4飛行の許可・承認申請に必要な書類は以下となります。
・無人航空機の飛行に関する許可・承認申請書(カテゴリーⅢ飛行用)
・飛行経路
・無人航空機の一覧
・無人航空機を飛行させる者の一覧
・飛行マニュアル
・リスク評価作業シート
・その他補足資料
許可・承認申請にいたるまで
許可申請に向けた一般的なプロセスとしては、以下となります。
①運航経路選定
地域調査・電波環境調査・自治体等関係調査など運航経路の選定をする必要があります。
②運航CONOPS作成
まず、「CONOPS」とは、「Concept of perations」の略で、運航者が想定する運航計画をまとめた運航に関わる概念書として定義されています。
主に「運航組織の概要」、「運航(方法)」、「訓練(プロセス・プロシージャ・プログラム)」、「機体仕様・特性・システム」を記載する形となります。
以下が記載項目例です。
「運航組織の概要」
・運航組織、体制図、責任分担
・安全方針
・使用機体の設計体制及び製造組織の構成
・運航に関わるスタッフ(操縦者以外)の訓練
・整備組織
・運航役割
・無人航空機の形態管理(設計変更時の役割分担)
「運航(方法)」
・運航形態(目的、方法、場所、人口密度、空域等)
・運航方式、方針、緊急時の対応方針、トラブル対応方法
「訓練(プロセス・プロシージャ・プログラム)」
・訓練一般(運航関係者毎の机上、実地での訓練方法)
・操縦者の操縦技能、整備技能の資格要件
・初期訓練方法
・能力維持方法
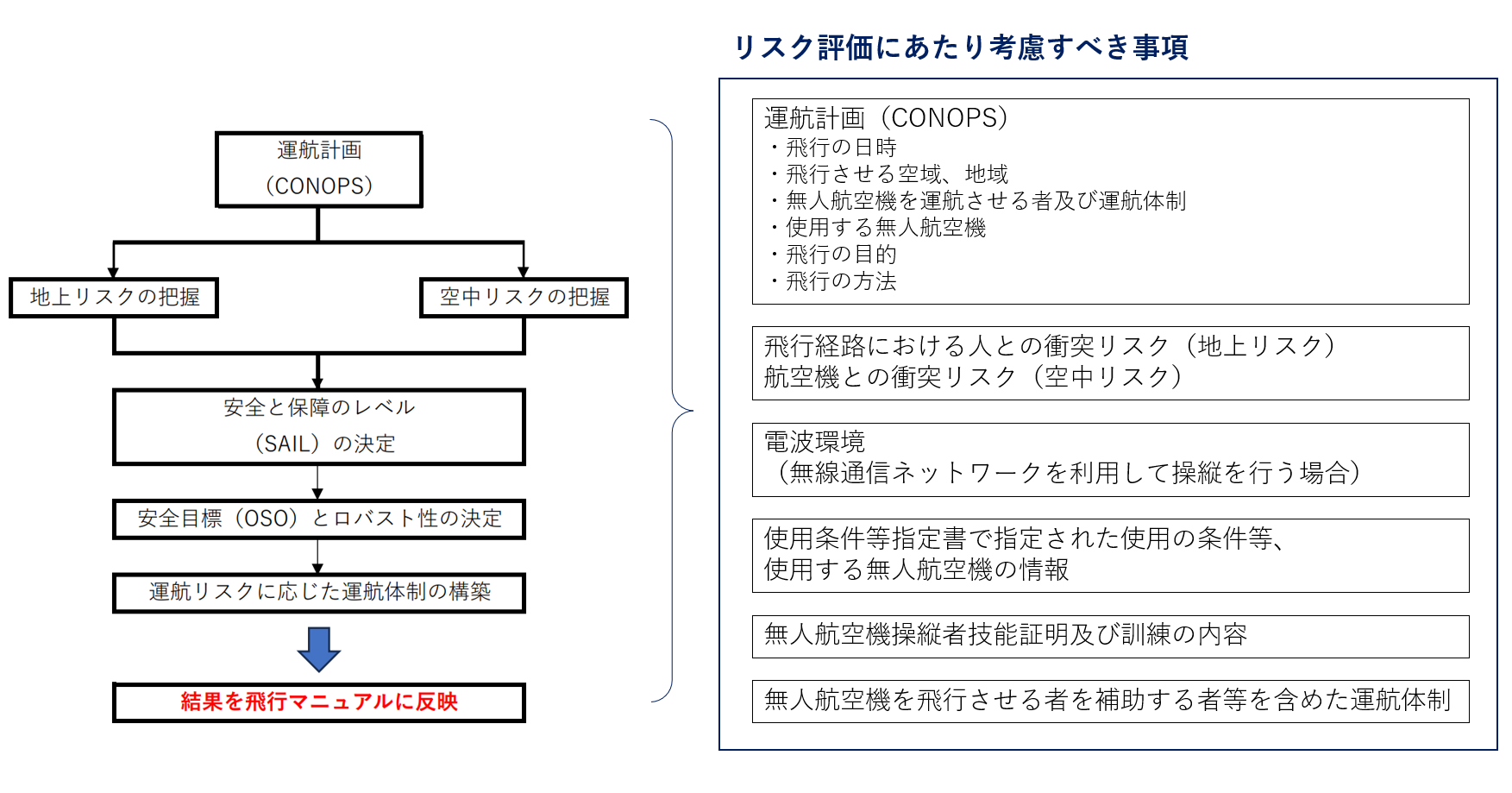
③リスク評価実施
リスク評価にあたってはJARUSのSORAを踏まえ、我が国の制度に整合を図って作成された福島RTFのガイドライン使用を推奨されています。
ガイドラインの中で「リスク」とは、「ある事象の発生頻度(確率)とそれによる影響の重大性との組合せ」と定義しており、JARUS SORAと同様に、技術(運航に関係する機器・システム等は安全に利用できる状態か)・人(運航に関係する人は、その職務を安全に実行できる状態か)・組織(運航に関係する組織は安全に管理をされている状態か)をベストプラクティス(今までの慣行に基づく最善の事例)に基づいて具体的な運航のリスクを評価します。
具体的には、①地上リスクの把握と軽減策の確認、②空中リスクの判定と戦略的対策の確認、③SAIL毎に求められるロバスト性充足の確認となります。
①地上リスクの判定と低減策の確認
【地上リスクの判定】
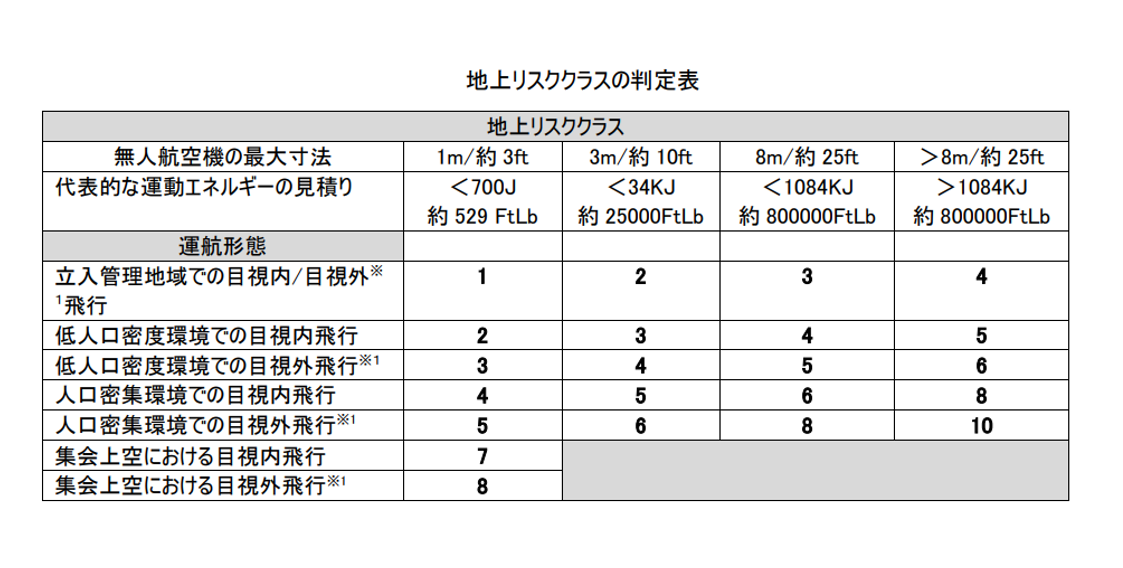
無人航空機の地上リスクとして、人との衝突リスクがあります。無人航空機は制御不能な状態に陥った時、人と衝突し、重大な障害を引き起こす可能性があります。
運航者に、計画する地上リスクの把握を行い、リスクにさらされる第三者の人数および衝突の際の人が吸収する衝撃を減らすための適切な努力の実施と、無人航空機の運航が制御不能になった場合に備えて設定する緊急時対応手順及び計画を求めます。
運航者が計画する運航の定量的な地上リスクの把握のため、「地上リスククラスの判定表」を用いて地上リスククラスの判定を行います。無人航空機の最大寸法及び運動エネルギーと想定する運航形態の交点により地上リスククラスを決定します。
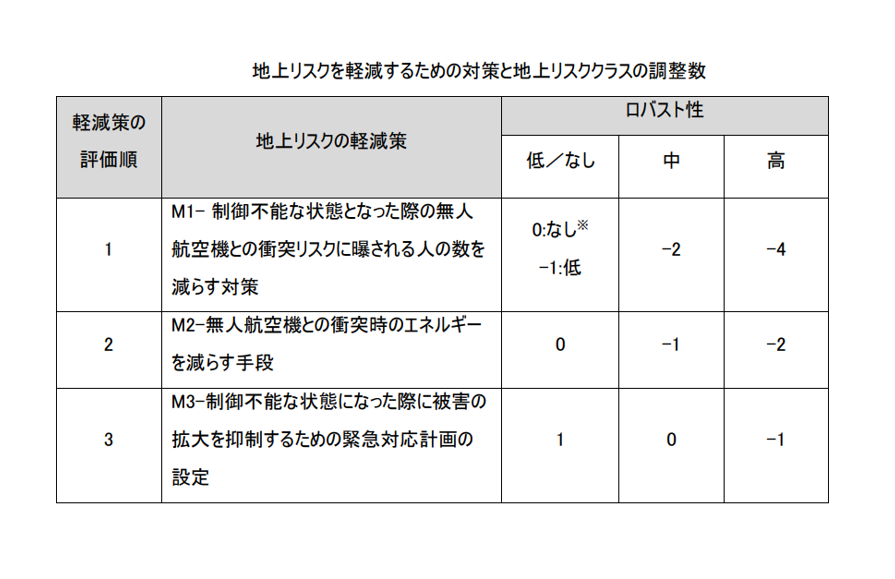
【地上リスクの低減】
リスクに曝される第三者の人数および衝突の際の人が吸収する衝撃を減らすための適切な努力を促すために、「地上リスクの判定表」で特定された地上リスククラスに対して、地上リスクの軽減策とロバスト性※1 に応じた地上リスククラスの調整数を示す「地上リスクを軽減する対策と地上リスククラスの調整数」の対策を行うことにより地上リスククラスを適切に調整することができます。なお、軽減策はM1から順番に評価しなければなりません。
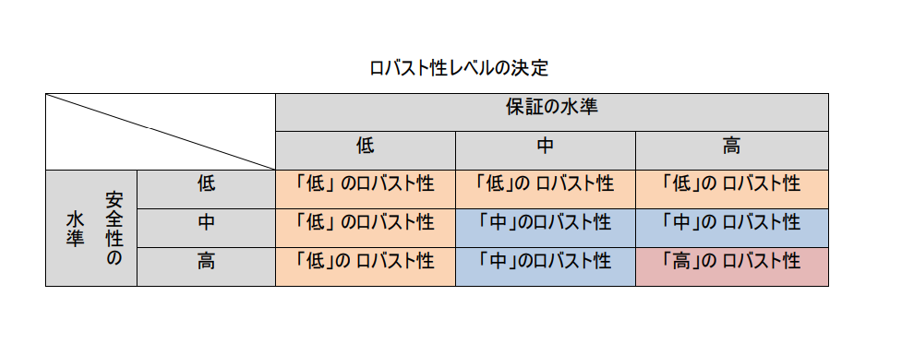
 ※1 ロバスト性とは、外的及び内的要因による危険な状況変化への対策が効果的であることの水準を示すものであり、無人航空機の運航の安全確保措置を計画するにあたり重要な概念です。ロバスト性は、リスク評価の結果講じるべき「安全性の水準」(安全性の増加)と計画されている安全性の確保措置がどの程度確実に実施されているかを示す「保証の水準」(証明の方法)の双方を勘案して評価します。安全確保措置に必要とされるロバスト性は、いずれもその運航形態のリスクに応じて低、中、高の 3つの異なるロバスト性の水準を用い検討します。安全性の水準と保証の水準のうちのいずれか低い方に準じて、その安全確保措置は評価されます。
※1 ロバスト性とは、外的及び内的要因による危険な状況変化への対策が効果的であることの水準を示すものであり、無人航空機の運航の安全確保措置を計画するにあたり重要な概念です。ロバスト性は、リスク評価の結果講じるべき「安全性の水準」(安全性の増加)と計画されている安全性の確保措置がどの程度確実に実施されているかを示す「保証の水準」(証明の方法)の双方を勘案して評価します。安全確保措置に必要とされるロバスト性は、いずれもその運航形態のリスクに応じて低、中、高の 3つの異なるロバスト性の水準を用い検討します。安全性の水準と保証の水準のうちのいずれか低い方に準じて、その安全確保措置は評価されます。
②空中リスクの判定と戦略的対策の確認
【空中リスクの判定】
有人航空機との空中衝突に対するリスクを評価します。有人航空機との間に適切な間隔が維持できない場合、結果として有人航空機との衝突等、重大な事故を引き起こす可能性があります。
運航者が飛行の計画を行うにあたり、空中衝突リスクを検討するエリアの把握や、そのエリアでの有人航空機との間隔を維持する適切な措置のあり方についての理解及び可能な限りの対策の実施を求めます。
空中リスクの把握のため、まず、飛行を検討しているエリアでの有人航空機に遭遇する確率を空中リスククラスとして定性的に分類・判定します。空中リスククラスは、「空中リスククラスの判定フローチャート」により判定を行います。
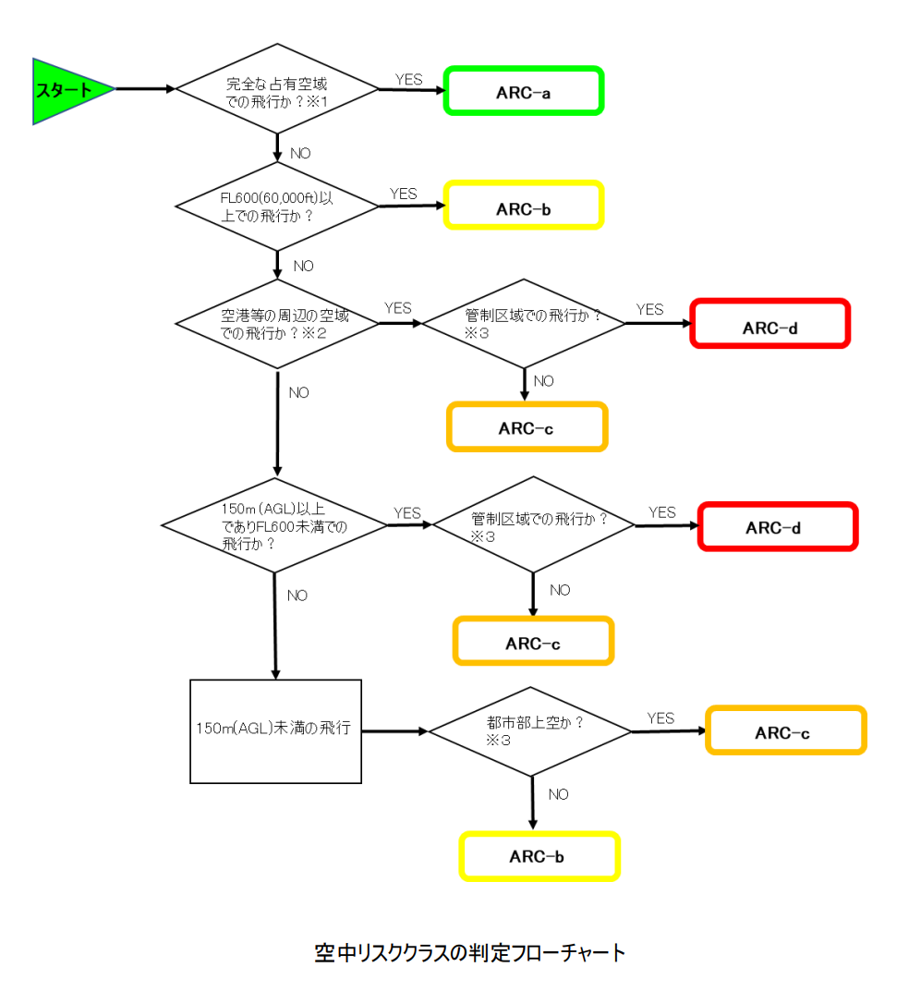
各空中リスククラス(ARC : Airspace Risk Class)は以下となります。
ARC-a: 有人航空機との遭遇率が非常に低いと考えられ、衝突リスクが「戦術的対策」を追加しなくても許容される空域です。
ARC-b: 有人航空機に遭遇する可能性は低いが無視できない空域であり、「戦略的対策」によりリスクの大部分に対処することができます。
ARC-c: 有人航空機に遭遇する可能性が高い空域ですが、「戦略的対策」によりある程度のリスクに対処することができます。
ARC-d: 有人航空機との遭遇する可能性が高い空域であり、「戦略的対策」が利用できる可能性が非常に低い空域です。
【空中リスクの低減】
有人航空機に遭遇する確率を下げるために、「戦略的対策」と「戦術的対策」によるリスク低減が可能です。
・「戦略的対策」を適用した空中リスクの低減(任意)
定性的に決定した空中リスククラスに対して、定量的な「戦略的対策」を適用することにより空中リスククラスを低減することができます。「戦略的対策」は、飛行前に有人航空機と遭遇する確率やリスクにさらされている時間を減らすことを目的とした対策や運用制限のことです。「戦略的対策」を適用した空中リスククラスの低減は必須ではなく任意です。
例えば、運航者が、他の空域使用者に頼ることなく管理できる運航上の自主的制限による空中リスククラス低減対策として、例えば、空港周辺であるが有人航空機が運用されていない時間帯に飛行を行うことや、有人航空機が飛行することが到底考えられない建物に沿った飛行等が考えられます。
・「戦術的対策」による空中リスクの軽減及び要求レベル
「戦術的対策」は飛行する空域の安全目標を達成するために必要な空中衝突の残留リスク※2 を軽減するために必要とされます。「戦術的対策」は目視内飛行における「視認して回避する」の手段をとるか、飛行する空域の安全目標を達成するために、「視認して回避する」手段の代替手段を提供するシステム(「検知して回避」するための衝突回避システム)を必要とする場合があります。
※2 「残留リスク」とは、定性的に判定した空中リスクに対して、「戦略的対策」を適用した後に残留する空中衝突リスクのことです。
a.無人航空機を目視内で飛行し有人航空機との衝突を回避する
b.外部的な手段をとって有人航空機との衝突を回避する方法
航空管制等のシステムを利用して有人航空機との間隔を維持する方法です。
c.衝突回避システムを利用した方法
無人航空機の機上や地上、あるいはその両方に存在する検知・回避システムを利用して有人航空機との衝突を回避する方法です。
「戦術的対策」は、これまでのステップで特定された空中リスククラスに応じて要求のレベル(低・中・高)が割り当てられます。
③SAIL毎に求められるロバスト性充足
これまで特定してきた地上及び空中リスクに基づき、当該運航に推奨される安全目標(OSO)の安全性と保証のレベル(SAIL)を決定します。
【安全性と保証レベル(SAIL)の決定】
特定された地上リスククラス及び空中リスククラスを用いて、「SAILの決定」を用いて安全性と保証のレベル(SAIL)を決定します。
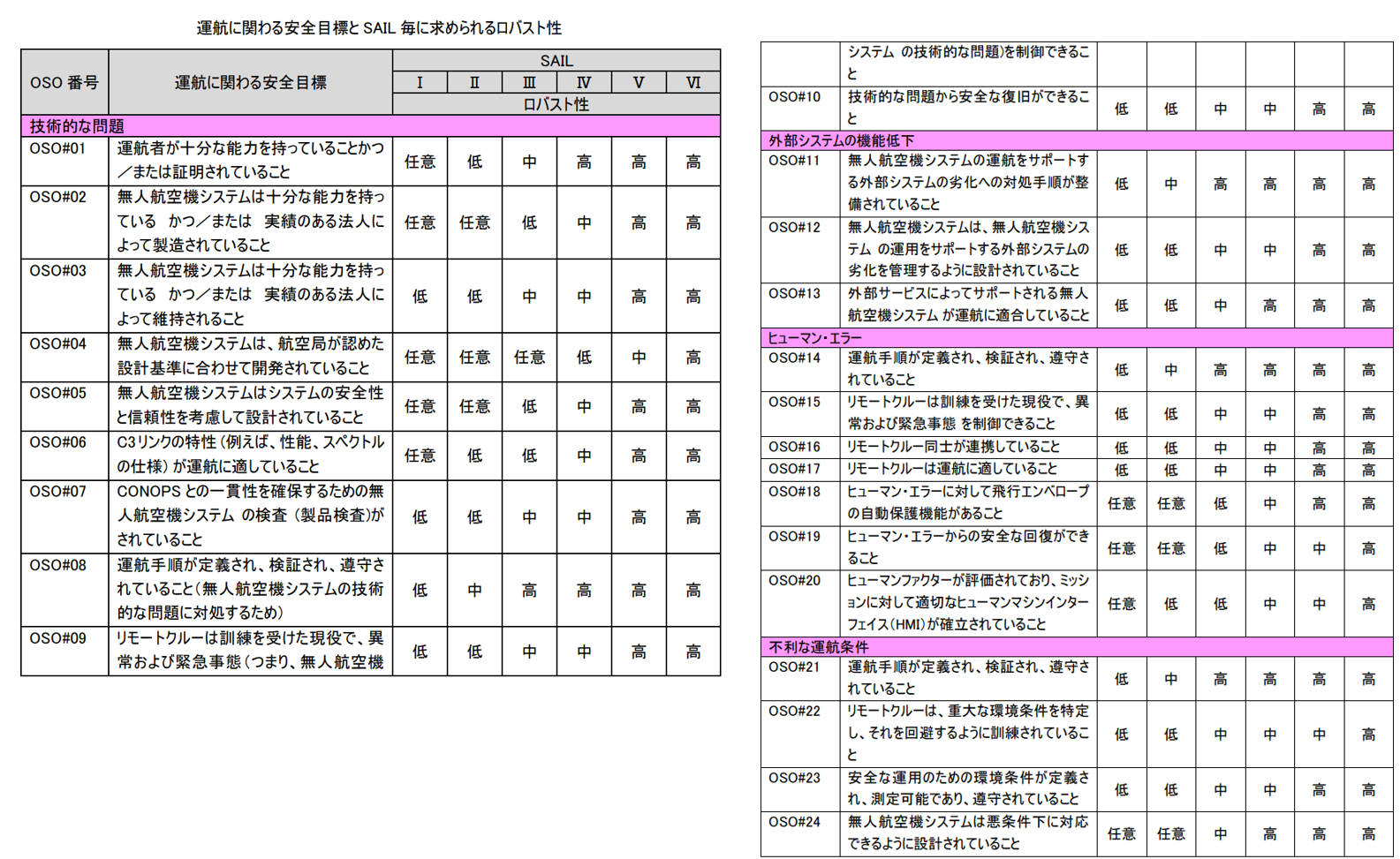
【運航に関わる安全目標(OSO)とSAIL毎に求められるロバスト性の決定】
決定された SAIL に基づき、当該運航に係わる安全目標に対するロバスト性を「運航に関わる安全目標とSAIL毎に求められるロバスト性」により決定します。
【ロバスト性を達成するために求められる「安全性の水準」と「保証の水準】
決定された運航に関わる安全目標(OSO)に対するロバスト性を達成するために必要とされる「安全性の水準」と「保証の水準」を「運航に関わる安全目標に対する安全性の水準と保証の水準」(https://x.gd/clRJS)に示します。運航者は、実施する運航が必要とされるロバスト性を満たしていることを確認し示さなければなりません。
リスク評価適用例がこちらとなります(https://x.gd/Q0Arb)。
④飛行マニュアルの作成
各対策や安全目標を達成するため、運航者は本リスク評価の結果に基づき、安全確保措置として運航に関わる飛行マニュアルを作成することが推奨されます。
また、審査要領との整合性が取れている形で作成しなければいけません。
例えば、操縦者について、「基本的な飛行経歴、知識及び能力並びに飛行形態に応じた知識及び能力を習得するための訓練方法」や「業務のために、無人航空機を飛行させるために適切な能力を有しているかどうかを確認するための方法」で技能証明保有の事実だけでなく、レベル4飛行を行うために必要な要素全てに対する訓練内容を記載し、操縦者の能力を担保する必要があります。
カテゴリーⅢ飛行、レベル4飛行(有人地帯における補助者なし目視外飛行)のサポートについて

これからカテゴリーⅢ飛行を目指される方や、レベル3飛行の実証実験でお困りの方は、お問合せフォームからご相談ください。詳細内容を知識・経験が豊富な行政書士が説明させていただきます。
academic worksドローン規制担当
TEL:03-5318-9046(平日10:00-17:00)
法令解説・資料等
ドローン(無人航空機)の規制
実績・事例集
RECOMMENDED
おすすめ記事
-
航空法
< 詳しくはこちら >
Published on 2023/11/15
カテゴリーⅢ飛行、レベル4飛行(有人地帯における補助者なし目視外飛行)
-
 航空法
< 詳しくはこちら >
航空法
< 詳しくはこちら >Published on 2023/06/19
無人航空機・国家ライセンススクール「登録講習機関」の登録手続きと流れ
-
 航空法
< 詳しくはこちら >
航空法
< 詳しくはこちら >Published on 2023/11/16
国家ライセンス取得後にすべきこと
-
 航空法
< 詳しくはこちら >
航空法
< 詳しくはこちら >Published on 2022/08/03
2022年12月5日開始、無人航空機・登録講習機関の制度について
-
 航空法
< 詳しくはこちら >
航空法
< 詳しくはこちら >Published on 2023/11/10
飛行日誌の記録方法について